



UR Painter: Human-Robot Collaboration
Harvard GSD, 2020
Team member: Guanyi Wang
#UR10RobotProgramming #RoboticControlling #HCI #Programming
Tools: Processing, Machina Bridge, UR10 Robot
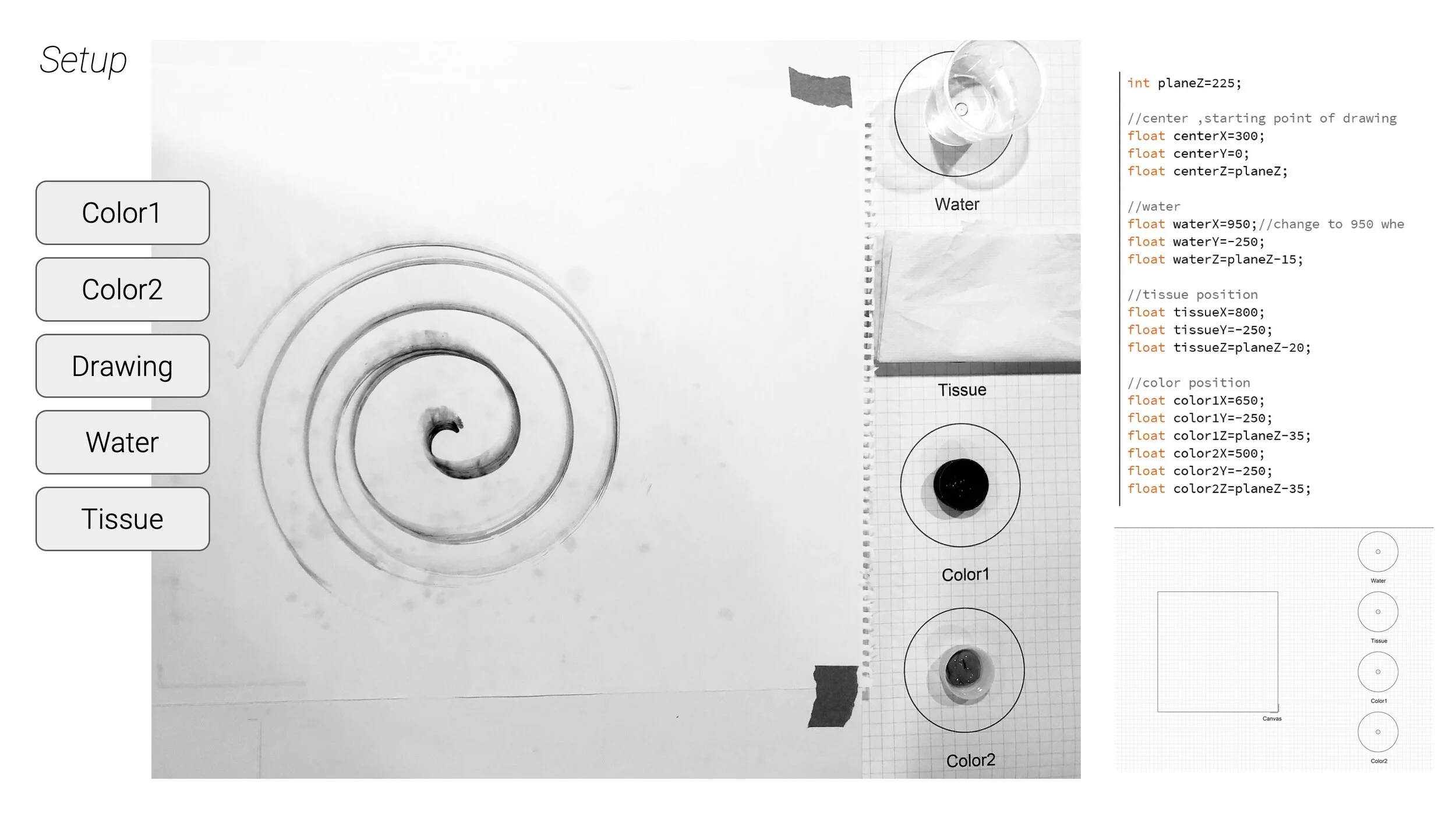
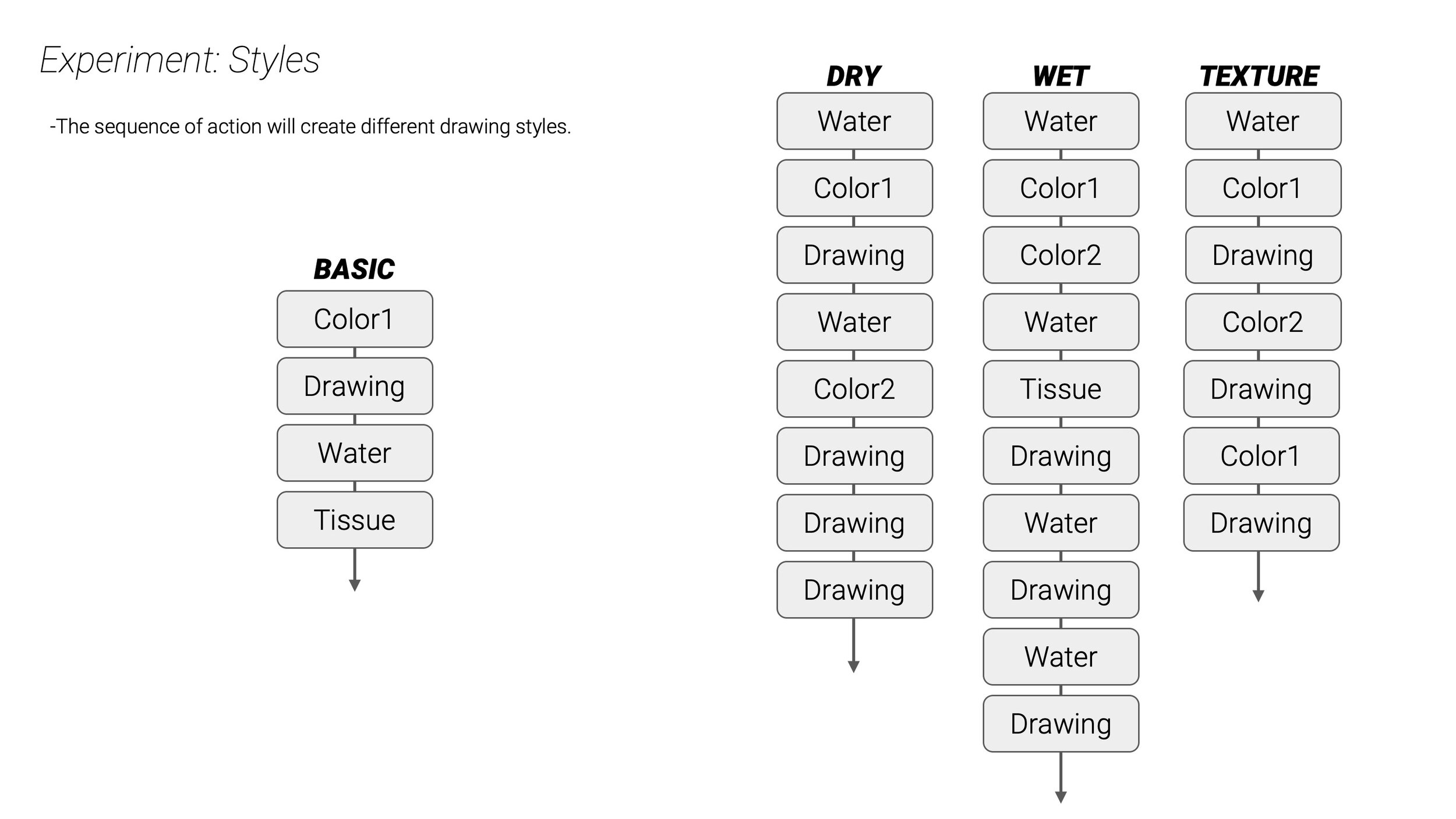
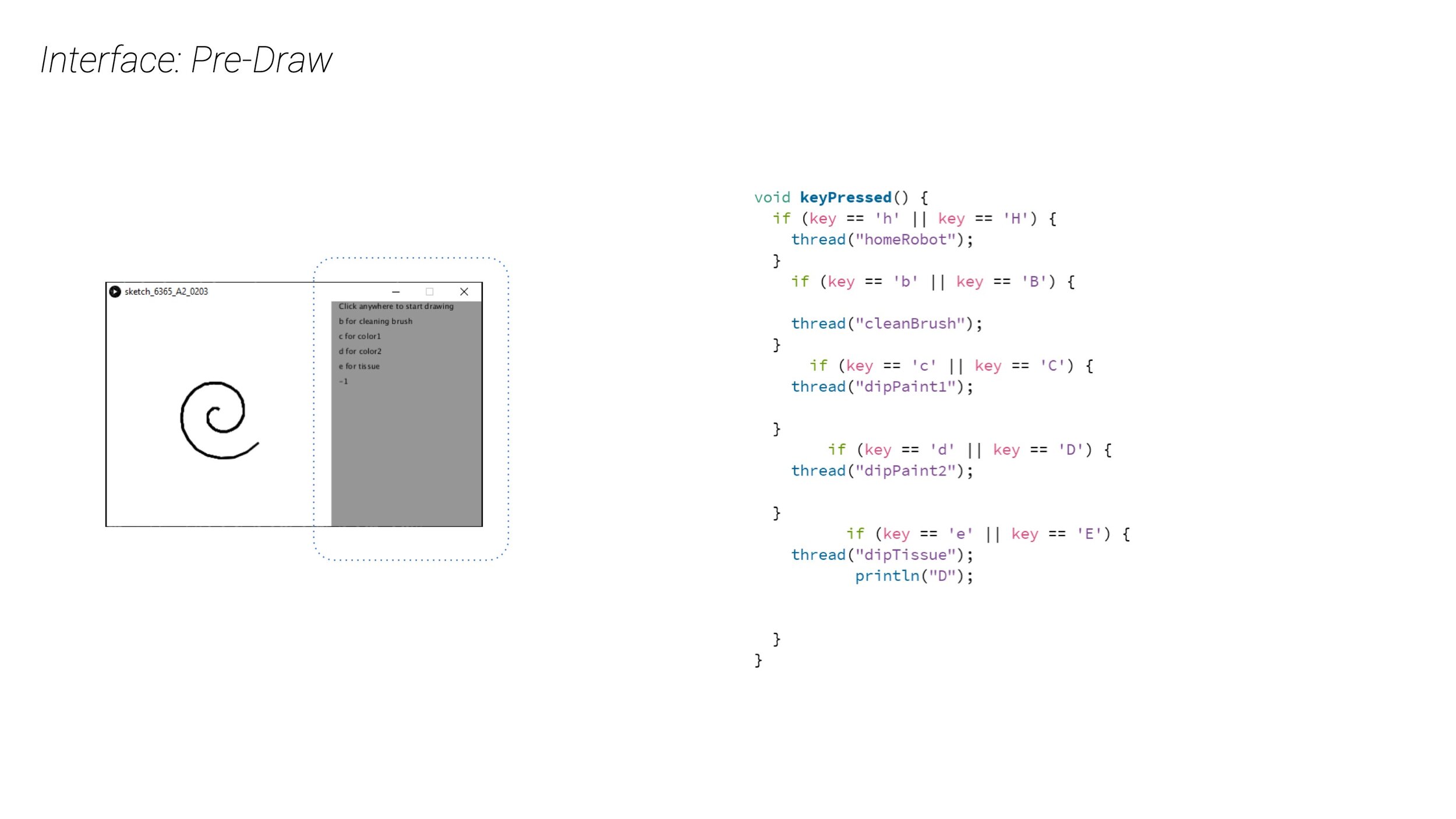
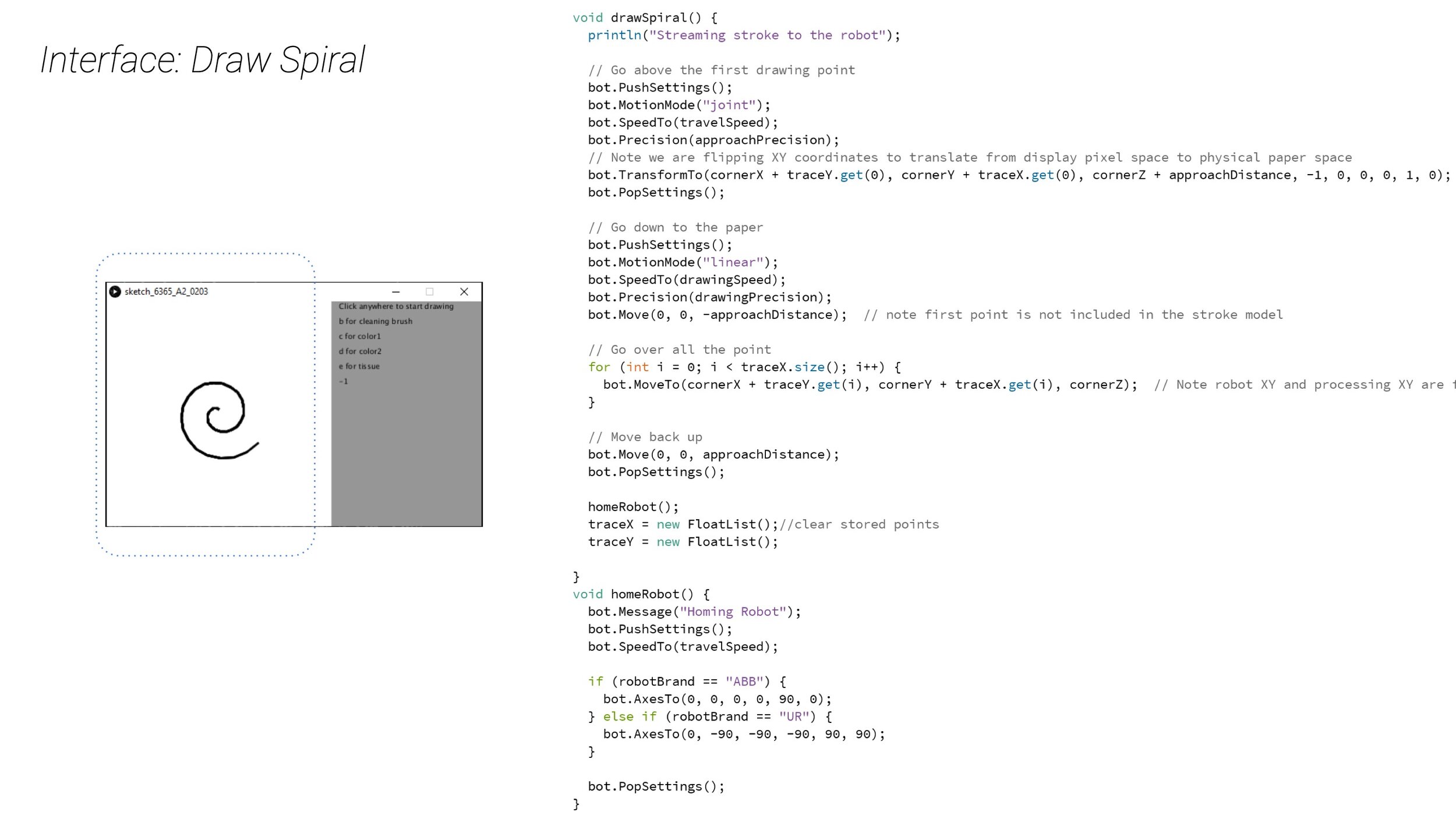
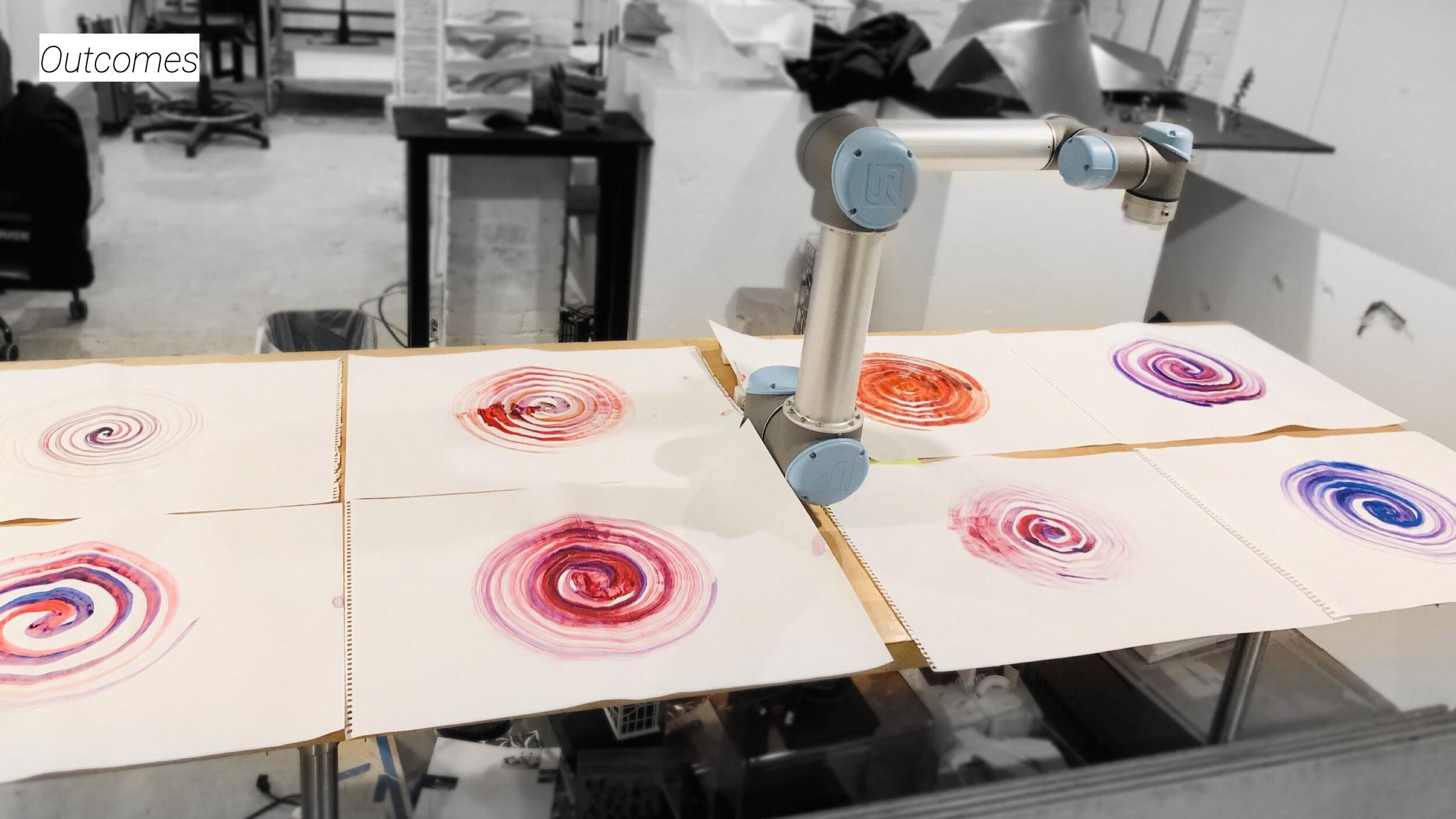
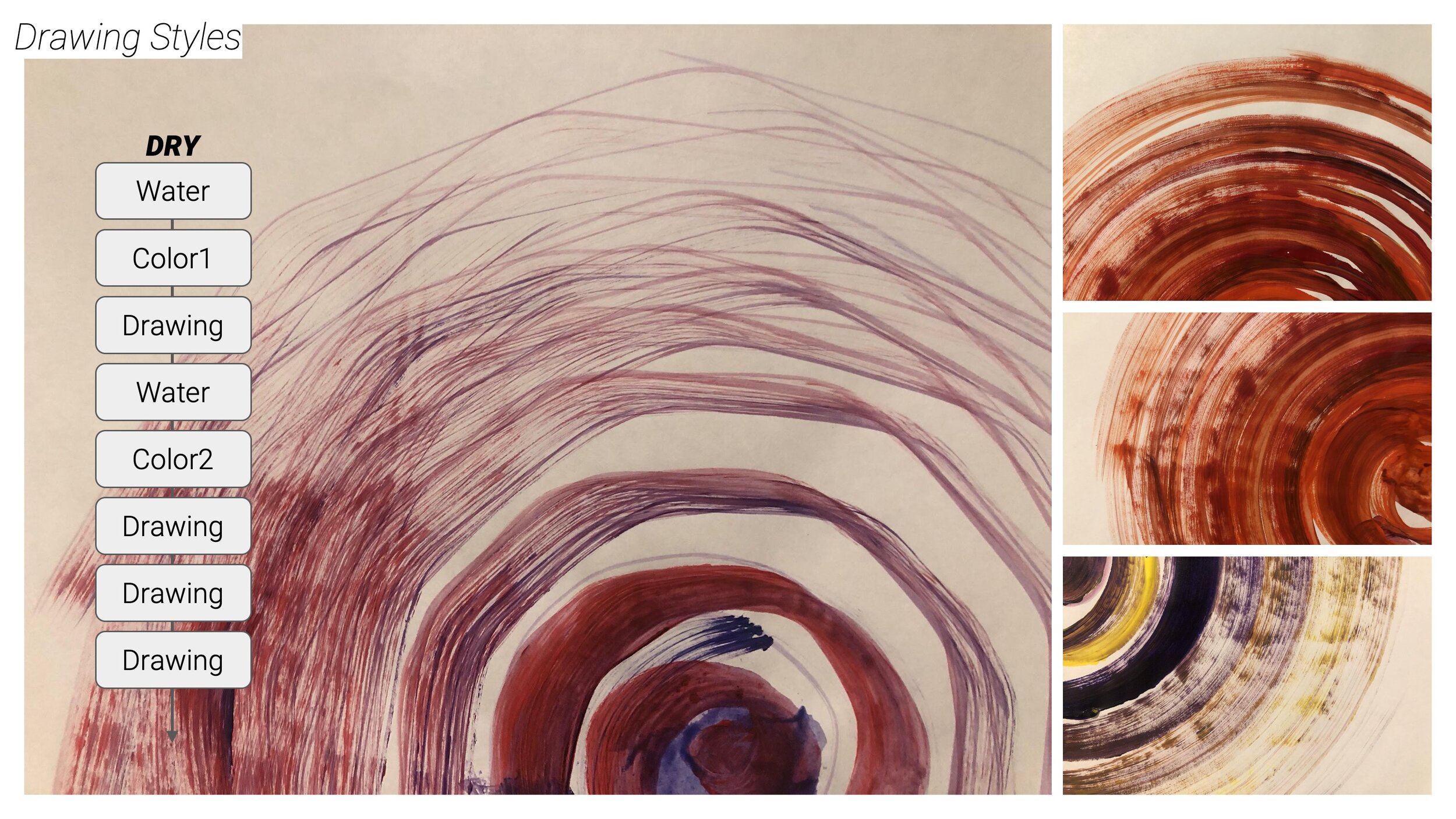
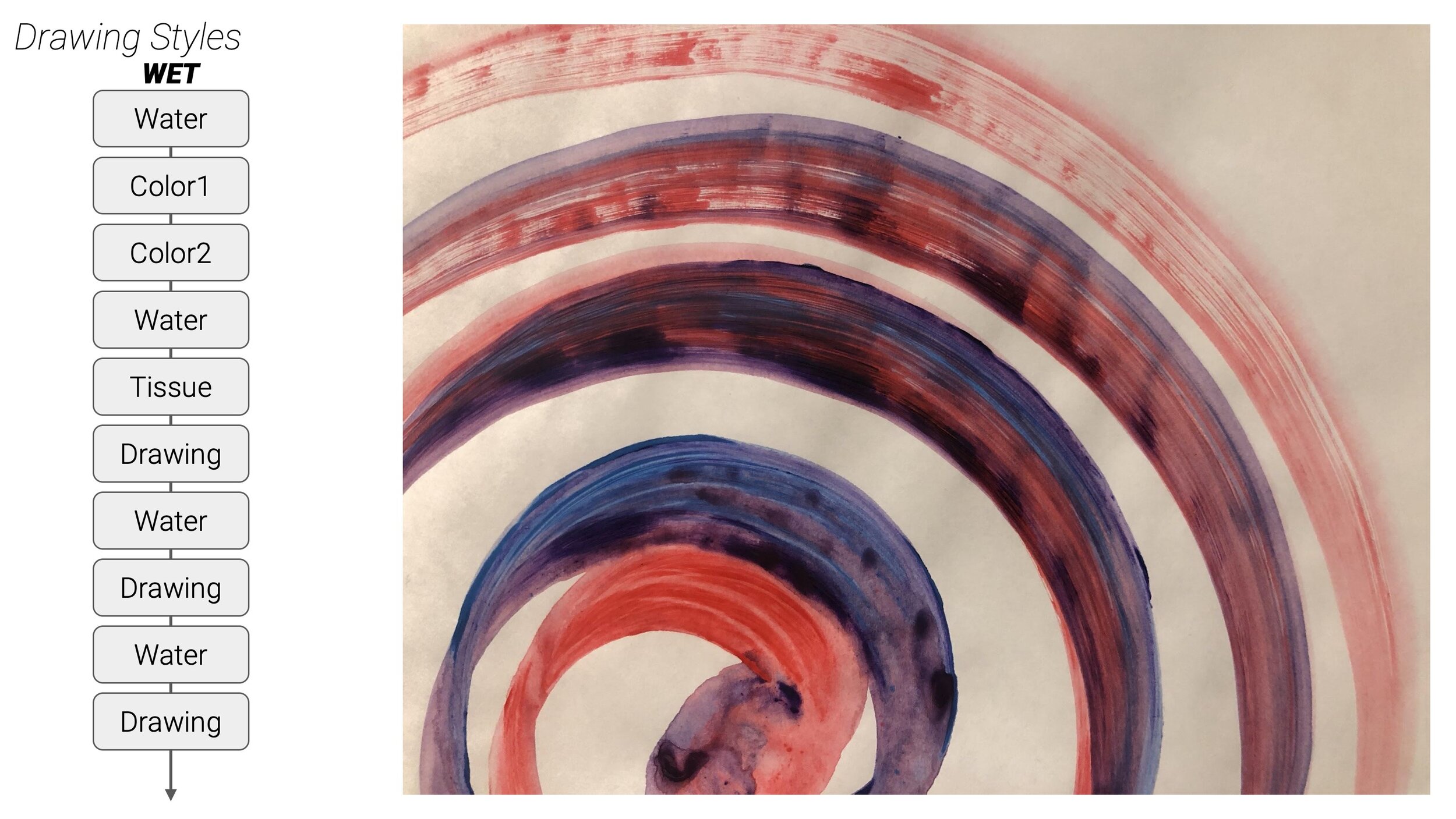
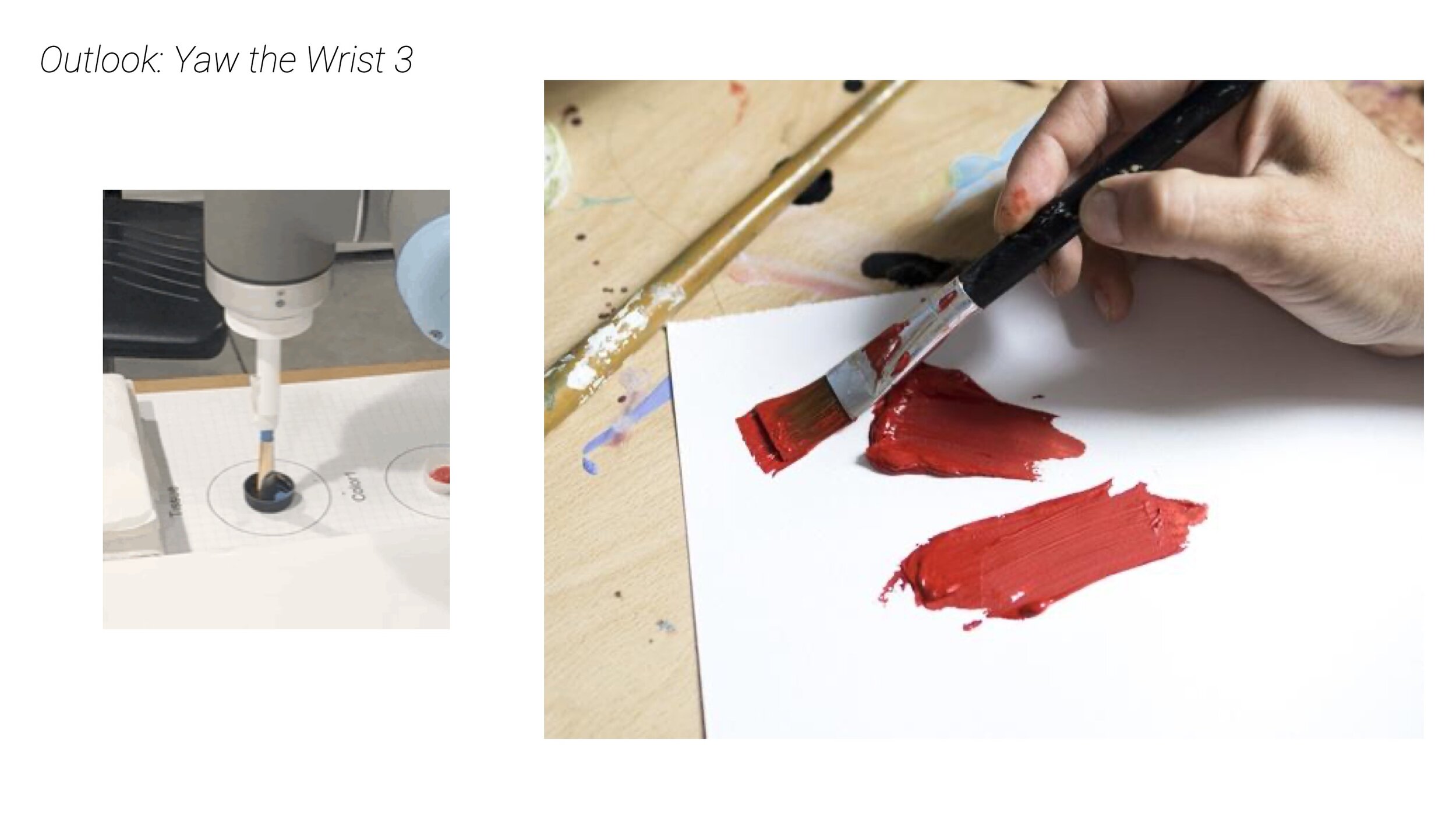
Over four weeks, we explored how the UR10 Robot could be programmed to paint with water-based pigments, simulating human-like brushwork through precise robotic control. The robot was tasked with a sequence of actions—dipping into different colors, diluting pigment at specific moments, and following a defined path with controlled elbow height and speed to move the brush across the paper.
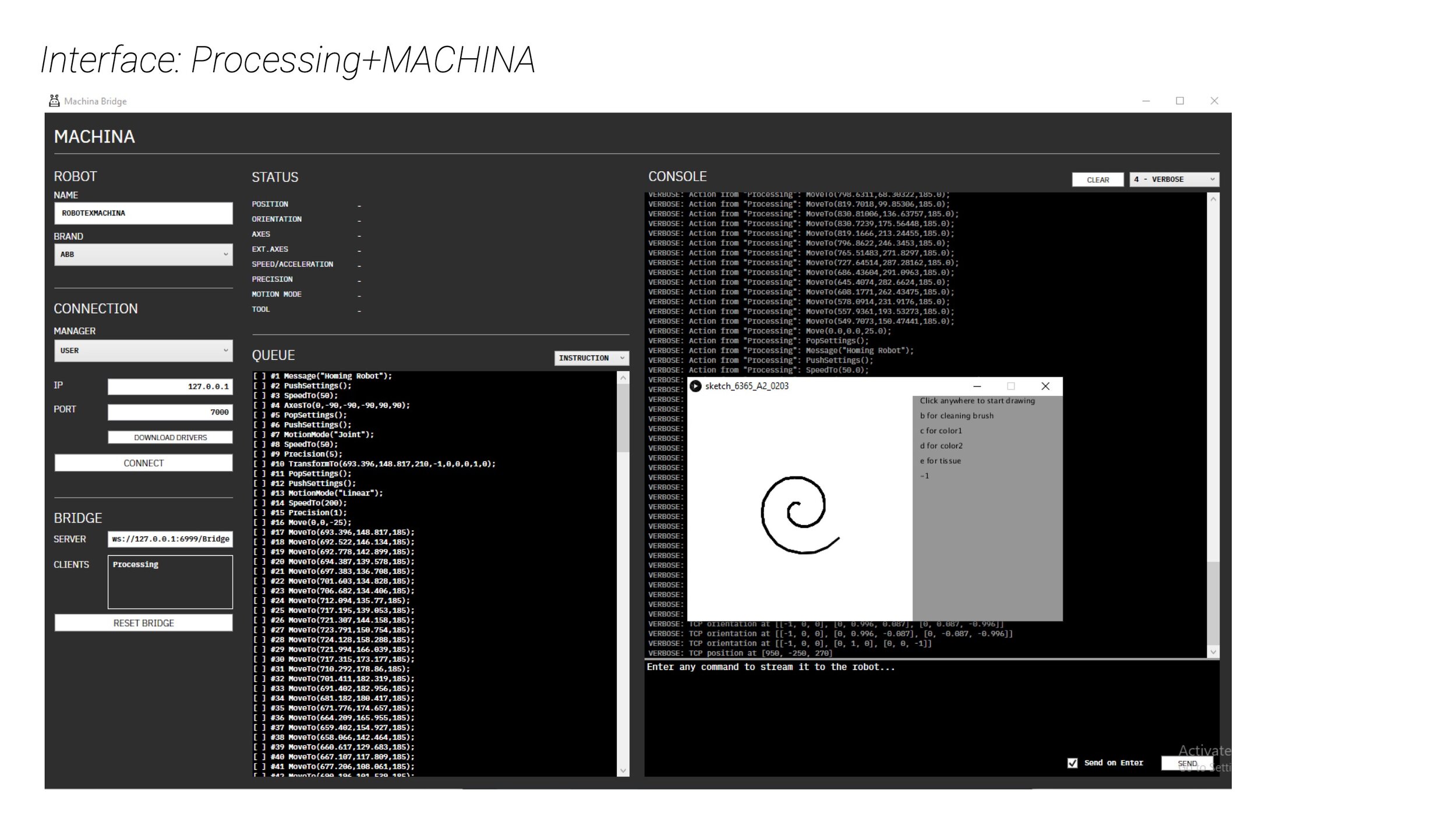
One of the biggest challenges was calibrating each movement to balance safety and artistic intent. Fine-tuning speed, pressure, and sequencing was crucial to achieving the best visual effects. The process involved translating human drawing principles into machine-readable commands via Machina simulation and extensive physical prototyping.
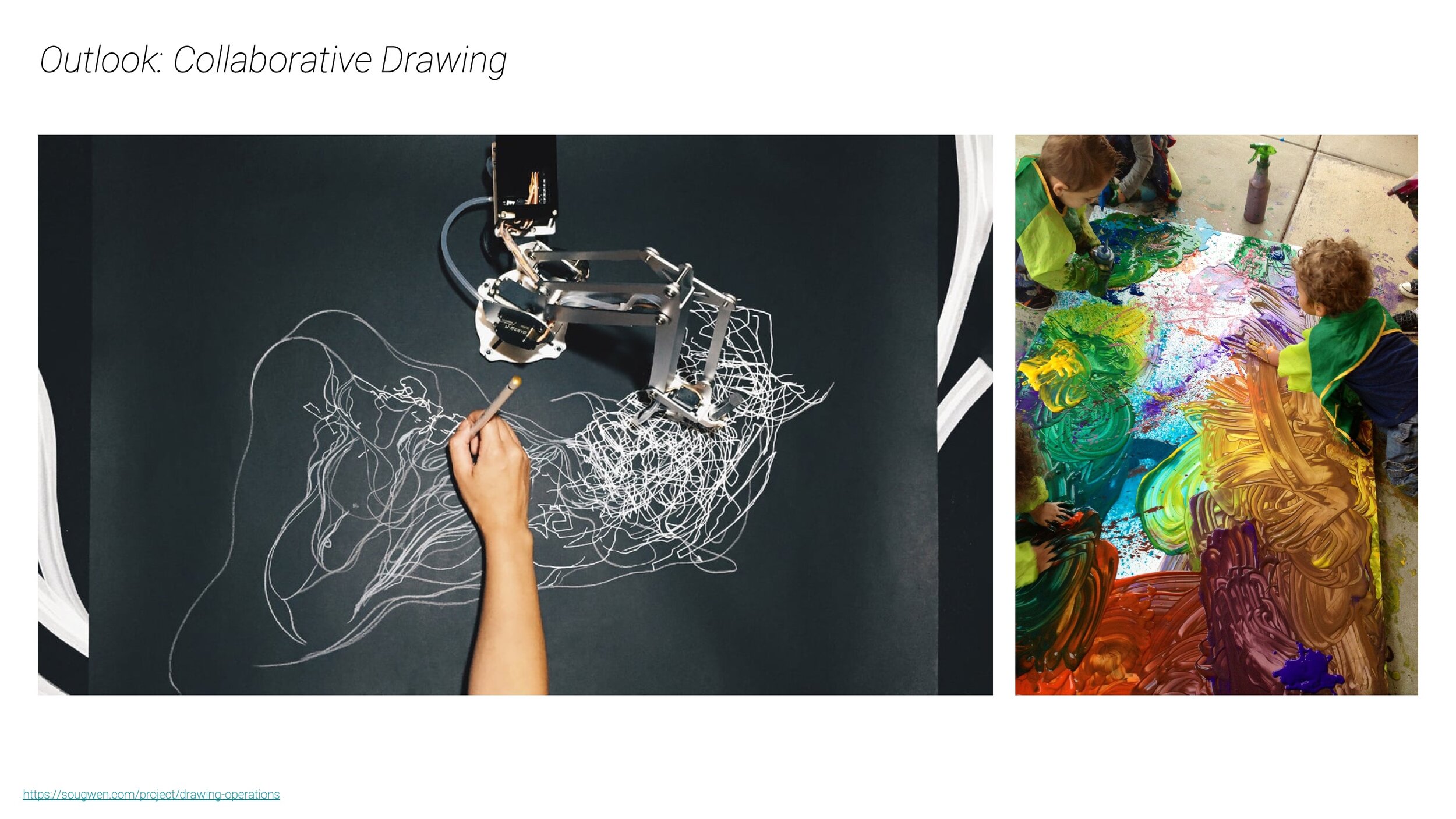
An unexpected yet fascinating discovery emerged: the robot’s ultra-precise movements, combined with the natural bending of the brush and fluid pigment flow, created an aesthetic that was both controlled and unpredictable. This delicate balance of structured precision and organic spontaneity led to a new artistic philosophy—one of semi-unconscious, guided release, where human intention and robotic execution merge into something uniquely beautiful.